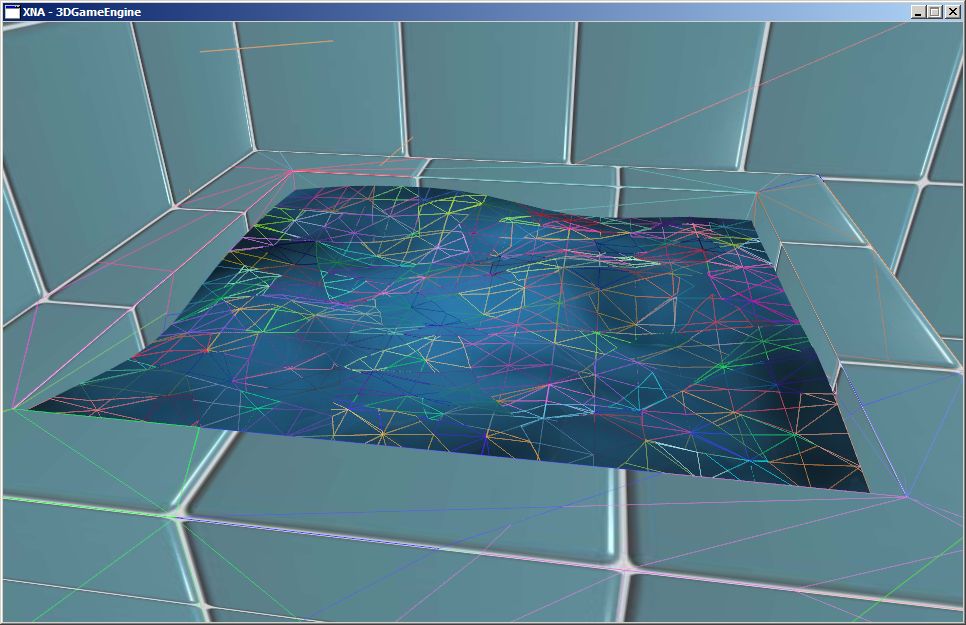
The first screeshot shows a room in the world where the BSP-Tree is visible which is used to do the collision detection with.
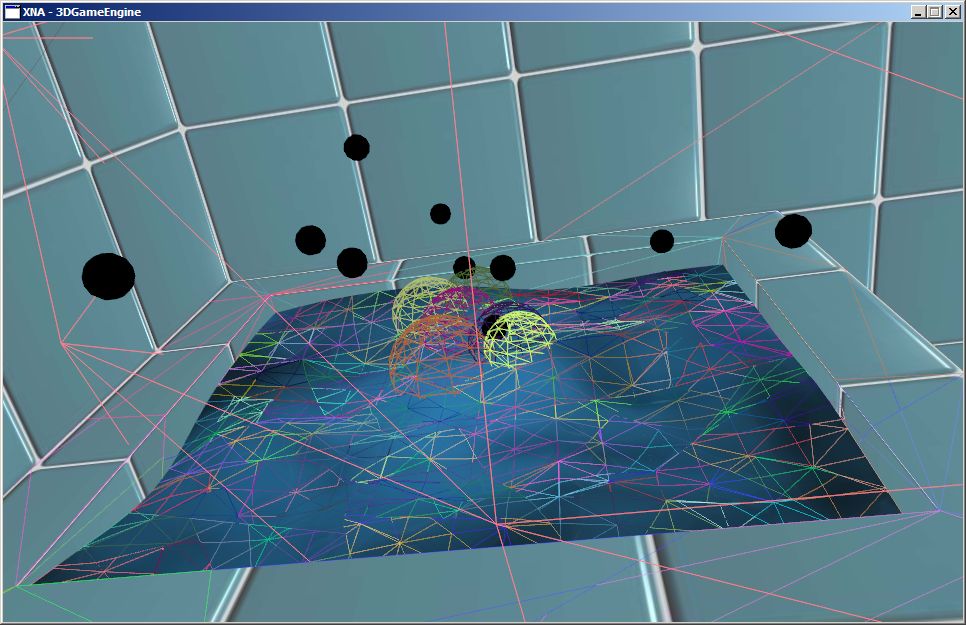
The second screeshot shows the same room where the BSP-Tree draws a bounding sphere around the node(s) where a collision has been detected.